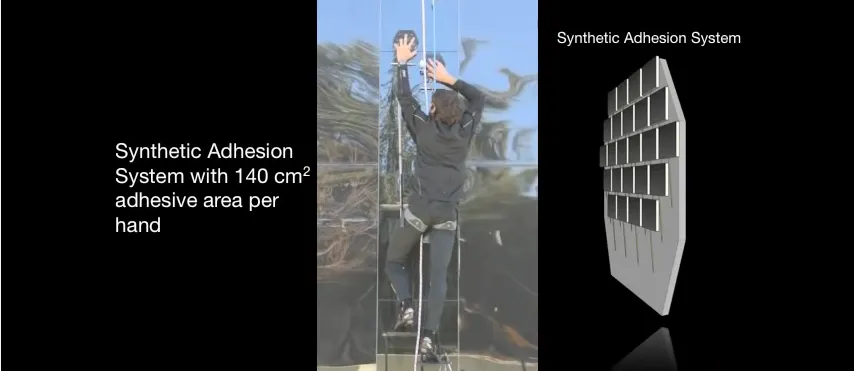
Screenshot from video Courtesy Biomimetics and Dextrous Manipulation Lab: Stanford engineers have built 'gecko gloves' that allow humans to climb glass walls.
Stanford Report - November 21st, 2014 - by Bjorn Carey
If you spot someone stuck to the sheer glass side of a building on the Stanford campus, it's probably Elliot Hawkes testing his dissertation work.
Hawkes, a mechanical engineering graduate student, works with a team of engineers who are developing controllable, reusable adhesive materials that, like the gecko toes that inspire the work, can form a strong bond with smooth surfaces but also release with minimal effort.
A long-standing trade-off with gecko-inspired adhesives is that making them larger tends to cut into their performance. But using this synthetic adhesive, the group has developed a device that shares large loads very evenly across every patch of the adhesive. This device can create sufficient adhesion to allow a person to climb a glass wall.
"It's a lot of fun, but also a little weird, because it doesn't feel like you should be gripping glass," Hawkes said. "You keep expecting to slip off, and when you don't, it surprises you. It's pretty exhilarating."
The climbing devices are the latest iteration of gecko-inspired adhesive technology developed by researchers in Mark Cutkosky's Biomimetics and Dextrous Manipulation Lab. The work is described in the current issue of the Journal of the Royal Society Interface.
Each handheld gecko pad is covered with 24 adhesive tiles, and each of these is covered with sawtooth-shape polymer structures each 100 micrometers long (about the width of a human hair).
The pads are connected to special degressive springs, which become less stiff the further they are stretched. This characteristic means that when the springs are pulled upon, they apply an identical force to each adhesive tile and cause the sawtooth-like structures to flatten.
"When the pad first touches the surface, only the tips touch, so it's not sticky," said co-author Eric Eason, a graduate student in applied physics. "But when the load is applied, and the wedges turn over and come into contact with the surface, that creates the adhesion force."
As with actual geckos, the adhesives can be "turned" on and off. Simply release the load tension, and the pad loses its stickiness. "It can attach and detach with very little wasted energy," Eason said.
The ability of the device to scale up controllable adhesion to support large loads makes it attractive for several applications beyond human climbing, said Mark Cutkosky, the Fletcher Jones Chair in the School of Engineering and senior author on the paper.
"Some of the applications we're thinking of involve manufacturing robots that lift large glass panels or liquid-crystal displays," Cutkosky said. "We're also working on a project with NASA's Jet Propulsion Laboratory to apply these to the robotic arms of spacecraft that could gently latch on to orbital space debris, such as fuel tanks and solar panels, and move it to an orbital graveyard or pitch it toward Earth to burn up."
Previous work on synthetic and gecko adhesives showed that adhesive strength decreased as the size increased. In contrast, the engineers have shown that the special springs in their device make it possible to maintain the same adhesive strength at all sizes from a square millimeter to the size of a human hand.
The current version of the device can support about 200 pounds, Hawkes said, but, theoretically, increasing its size by 10 times would allow it to carry almost 2,000 pounds.
